Programming
- There are two main programming methods supported and tested with the Smart Plant:
ESPHome
Arduino
In both scenarios, you will first need to enter the board into flashing mode. For that, press and hold the Flash pushbutton while you reset the board (pressing once the Reset pushbutton).
Important
For flashing new firmwares, if the OTA support is not available, you will need an external USB-to-TTL module (like this) connected to the Serial port (3.3, GND, Tx, Rx).
Caution
When flashing the board, make sure its only powered from one power source: through the Serial port (by removing the battery connector) or through the battery (but then do not connect the 3.3V pin on the Serial port).
ESPHome
ESPHome is a well known platform for programming ESP-based devices with a very little effort. It is configured via YAML files and supports a wide range of functionalities and sensors.
Important
For using ESPHome, and all its funcionalities, you need to have a Home Assistant (HA) instance running in the same network as your Smart Plant.
Tip
A very easy way to upload and copy files (code or even images) into your ESPHome folder hosted in your HA instance is with the help of the Visual Studio Code integration for HA. This way you can just drag and drop the files over the folder on the Home Assistant’s Visual Studio Code navigation panel on your left.
The Smart Plant already comes with an embeded version of ESPHome, that would only require an OTA update to get it ready to work in your network:
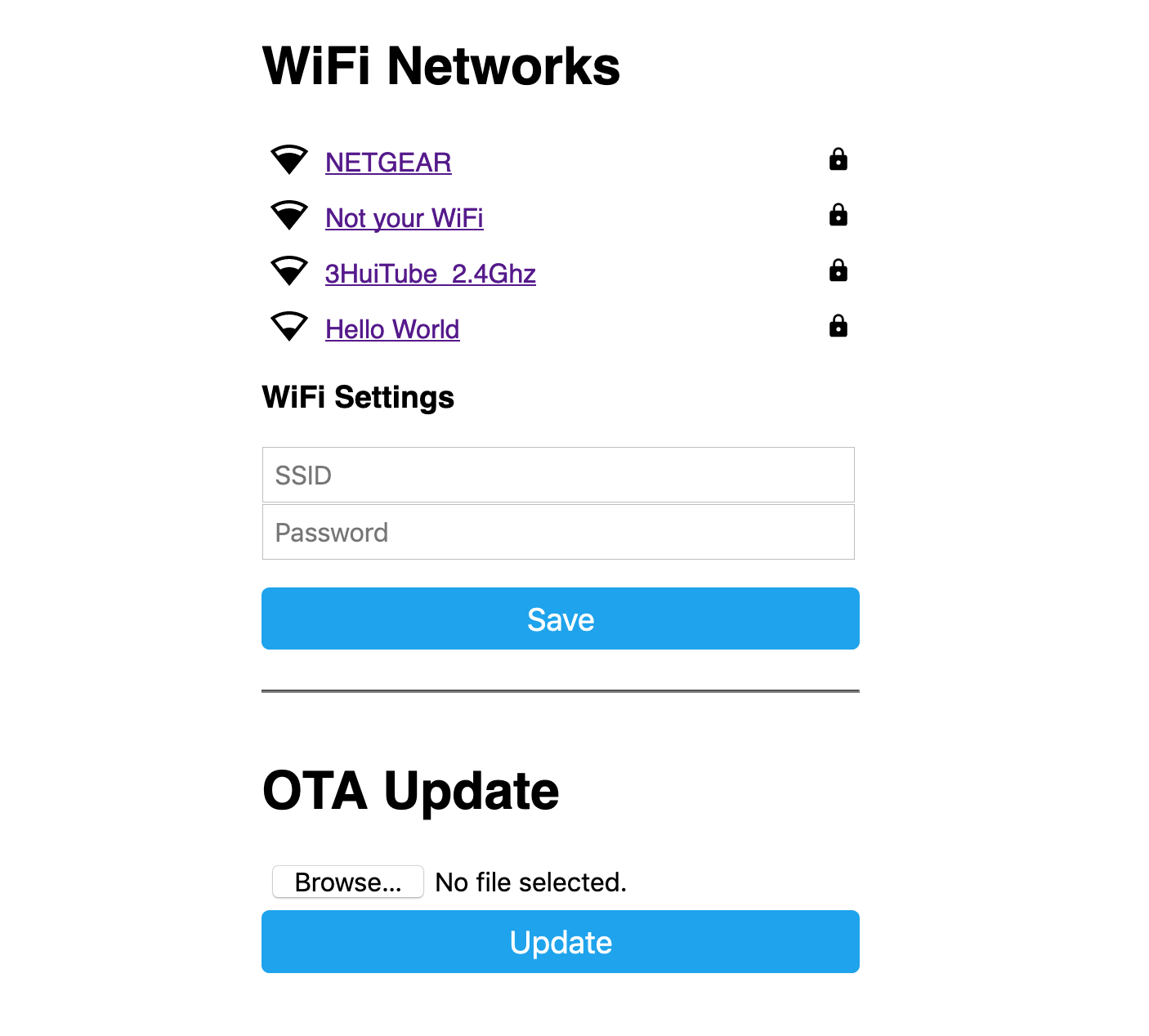
Power the board, and let it run for 1-2 minutes. When the board cannot connect to a WiFi network, it will create a fallback hotspot.
Use a smartphone or tablet and go to the WiFi settings, connect to the recently created Smart-Plant hotspot with the password smartplant.
Access to the captive portal and open the browser if doesn’t pop up automatically.
Enter your network setttings and press Save.
Now, your ESPHome device is ready to be found by Home Assistant in your network. Add it from the ESPHome section to add and edit a customized configuration file.
As an example of such configuration setup (and the one flashed on the factory settings of the Smart Plant) with all the dependencies:
In the folder structure above:
Audiowide.ttfThis is the fonts style of the displayed digits, you can download any of your choice, as long as they are TTF files (I don’t know if ESPHome will integrate OTF soon), and paste it there.
In this case, i used from the Audiowide font.
materialdesignicons-webfont_5.9.55.ttfAs with the previous file, this is a file containing a set of the icons fonts (the battery voltage level).
In this case I used MDI from google (version 5.9.55), but shouldn’t be any problem to look for the latest.
icon-map.hThis mapping file is used to associate a variable name with the icon ID from the previous file. It contains the following code:
1#include <map>
2std::map<int, std::string> battery_icon_map
3{
4 {0, "\U000F10CD"},
5 {1, "\U000F007A"},
6 {2, "\U000F007B"},
7 {3, "\U000F007C"},
8 {4, "\U000F007D"},
9 {5, "\U000F007E"},
10 {6, "\U000F007F"},
11 {7, "\U000F0080"},
12 {8, "\U000F0081"},
13 {9, "\U000F0082"},
14 {10, "\U000F0079"},
15};
Lemon_tree_label_page_1.pngThis is the background image that will be displayed on the e-paper. For having always a styled background image, I made a python script that generates the image of the plant, the title and the parameter gauges out of a JSON config file. Alternativelly, you can use any photo editor of your choice, but keep in mind the display size (296x128 pixel) and the center of each gauges (indicated in the YAML code).

smart-plant.yamlThis is the YAML configuration file, the most important file that configures your ESPHome-based SmartPlant:
1substitutions: 2 device_name: "smart-plant" 3 friendly_name: "Smart Plant" 4 project_name: "smart.plant" 5 project_version: "1.2" 6 ap_ssid: "Smart-Plant" 7 ap_pwd: "smartplant" 8 9esphome: 10 name: "${device_name}" 11 name_add_mac_suffix: true 12 includes: 13 - libraries/icon-map.h 14 project: 15 name: "${project_name}" 16 version: "${project_version}" 17 # Initialize the IIC bus immediatelly after the powering the sensors 18 on_boot: 19 priority: 600 20 then: 21 - lambda: |- 22 Wire.begin(); 23 delay(100); 24 25 26esp32: 27 board: esp32dev 28 framework: 29 type: arduino 30 31# Enable logging 32logger: 33 34# Enable Home Assistant API 35api: 36 37# Enable Over The Air updates 38ota: 39 40#Public location of this yaml file 41dashboard_import: 42 package_import_url: github://JGAguado/Smart_Plant/docs/source/files/configuration.yaml 43 import_full_config: false 44 45# Enable fallback hotspot (captive portal) in case wifi connection fails 46captive_portal: 47 48esp32_improv: 49 authorizer: none 50 51improv_serial: 52 53wifi: 54 ap: 55 ssid: "${ap_ssid}" 56 password: "${ap_pwd}" 57 58 59i2c: 60 scl: GPIO22 61 sda: GPIO21 62 scan: false 63 id: bus_a 64 frequency: 100kHz 65 66spi: 67 clk_pin: GPIO13 68 mosi_pin: GPIO14 69 70image: 71 - file: "plant_labels/Lemon_tree_label_page_1.png" 72 id: page_1_background 73 74font: 75 - file: "fonts/Audiowide.ttf" 76 id: font_title 77 size: 20 78 - file: "fonts/Audiowide.ttf" 79 id: font_subtitle 80 size: 15 81 - file: "fonts/Audiowide.ttf" 82 id: font_parameters 83 size: 15 84 - file: 'fonts/materialdesignicons-webfont.ttf' 85 id: font_icon_battery 86 size: 20 87 glyphs: 88 - "\U000F007A" # battery-10 89 - "\U000F007B" # battery-20 90 - "\U000F007C" # battery-30 91 - "\U000F007D" # battery-40 92 - "\U000F007E" # battery-50 93 - "\U000F007F" # battery-60 94 - "\U000F0080" # battery-70 95 - "\U000F0081" # battery-80 96 - "\U000F0082" # battery-90 97 - "\U000F0079" # battery 98 - "\U000F0083" # battery-alert 99 - "\U000F10CC" # battery-alert-variant 100 - "\U000F10CD" # battery-alert-variant-outline 101 - "\U000F092D" # wifi-off 102 - "\U000F092E" # wifi-strength-0 103 - "\U000F091F" # wifi-strength-1 104 - "\U000F0922" # wifi-strength-2 105 - "\U000F0925" # wifi-strength-3 106 - "\U000F0928" # wifi-strength-4 107 - "\U000F04E6" # sync 108 109time: 110 - platform: homeassistant 111 id: esptime 112 113switch: 114 - platform: gpio 115 pin: GPIO16 116 id: exc 117 name: "Excitation switch" 118 icon: "mdi:power" 119 restore_mode: ALWAYS_ON 120 121 122sensor: 123 # Battery level sensor 124 - platform: adc 125 pin: GPIO35 126 id: VCC 127 internal: true 128 attenuation: 11db 129 update_interval: 1s 130 filters: 131 - multiply: 1.796 132 accuracy_decimals: 5 133 unit_of_measurement: V 134 135 - platform: template 136 name: "Battery" 137 id: battery 138 unit_of_measurement: "%" 139 update_interval: 1s 140 lambda: |- 141 float battery_perc = 100.00 * (id(VCC).state) / (1.44); 142 return (battery_perc > 100.0) ? 100.0 : battery_perc ; 143 # Temperature and humidity sensor 144 - platform: aht10 145 temperature: 146 name: "${friendly_name} Temperature" 147 id: temp 148 icon: "mdi:thermometer" 149 humidity: 150 name: "${friendly_name} Air Humidity" 151 id: hum 152 icon: "mdi:water-percent" 153 update_interval: 1s 154 i2c_id: bus_a 155 156 # Light sensor 157 - platform: adc 158 pin: GPIO33 159 id: illum 160 name: "${friendly_name} Light" 161 icon: "mdi:white-balance-sunny" 162 attenuation: 11db 163 unit_of_measurement: lux 164 update_interval: 1s 165 filters: 166 - lambda: |- 167 return (x / 10000.0) * 2000000.0; 168 169 # Capacitive soil moisture sensor 170 - platform: adc 171 pin: GPIO32 172 name: "${friendly_name} Soil Moisture" 173 id : soil 174 icon: "mdi:cup-water" 175 update_interval: 1s 176 unit_of_measurement: "%" 177 attenuation: 11db 178 filters: 179 - median: 180 window_size: 7 181 send_every: 3 182 183 - calibrate_linear: 184 - 1.25 -> 100.00 185 - 2.8 -> 0.00 186 - lambda: if (x < 1) return 0; else if (x > 100) return 100; return (x); 187 accuracy_decimals: 0 188 on_value: 189 then: 190 - component.update: my_display 191 192display: 193 - platform: waveshare_epaper 194 dc_pin: GPIO27 195 cs_pin: GPIO15 196 busy_pin: GPIO25 197 reset_pin: GPIO26 198 rotation: 270 199 model: 2.90inv2 200 update_interval: never 201 id: my_display 202 pages: 203 - id: page1 204 lambda: |- 205 #define H_LEFT_MARGIN 4 206 #define H_RIGHT_MARGIN 280 207 #define H_CENTER 128 208 #define V_WEATHER 0 209 #define V_CLOCK 1 210 #define V_WIFI 30 211 #define V_VOLTAGE 60 212 #define V_BATTERY 90 213 214 it.image(0, 0, id(page_1_background)); 215 216 // Battery 217 float battery_perc = id(battery).state; 218 int battery_range = battery_perc / 10 ; 219 battery_range = (battery_range > 10) ? 10 : battery_range; 220 battery_range = (battery_range < 0) ? 0 : battery_range; 221 222 it.printf(278, 1, id(font_icon_battery), TextAlign::TOP_LEFT, battery_icon_map[battery_range].c_str() 223 ); 224 it.printf(278, 1, id(font_subtitle), TextAlign::TOP_RIGHT, 225 "%3.0f%%", battery_perc); 226 227 // Date 228 it.strftime(278, 18, id(font_subtitle), TextAlign::TOP_RIGHT, 229 "%H:%M %d/%m", id(esptime).now()); 230 231 232 // Parameters 233 // Drawing the marker over the gauge 234 float pi = 3.141592653589793; 235 float alpha = 4.71238898038469; // Defined as the gauge angle in radians (270deg) 236 float beta = 2*pi - alpha; 237 int radius = 22; // Radius of the gauge in pixels 238 int thick = 7; // Size of the marker 239 240 // *** Moisture *** 241 int min_range = 0; 242 int max_range = 100; 243 int xc = 80; 244 int yc = 50; 245 246 float measured = id(soil).state; 247 248 if (measured < min_range) { 249 measured = min_range; 250 } 251 if (measured > max_range) { 252 measured = max_range; 253 } 254 255 float val = (measured - min_range) / abs(max_range - min_range) * alpha; 256 257 int x0 = static_cast<int>(xc + radius + radius * cos(pi / 2 + beta / 2 + val)); 258 int y0 = static_cast<int>(yc + radius + radius * sin(pi / 2 + beta / 2 + val)); 259 int x1 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val + 0.1)); 260 int y1 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val + 0.1)); 261 int x2 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val - 0.1)); 262 int y2 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val - 0.1)); 263 it.line(x0, y0, x1, y1); 264 it.line(x1, y1, x2, y2); 265 it.line(x2, y2, x0, y0); 266 267 it.printf(xc + radius, yc + 1.7*radius, id(font_parameters), TextAlign::TOP_CENTER, 268 "%.0f%%", id(soil).state); 269 270 // *** Light *** 271 min_range = 0; 272 max_range = 10000; 273 xc = 134; 274 yc = 70; 275 276 measured = id(illum).state; 277 278 if (measured < min_range) { 279 measured = min_range; 280 } 281 if (measured > max_range) { 282 measured = max_range; 283 } 284 285 val = (measured - min_range) / abs(max_range - min_range) * alpha; 286 x0 = static_cast<int>(xc + radius + radius * cos(pi / 2 + beta / 2 + val)); 287 y0 = static_cast<int>(yc + radius + radius * sin(pi / 2 + beta / 2 + val)); 288 x1 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val + 0.1)); 289 y1 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val + 0.1)); 290 x2 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val - 0.1)); 291 y2 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val - 0.1)); 292 it.line(x0, y0, x1, y1); 293 it.line(x1, y1, x2, y2); 294 it.line(x2, y2, x0, y0); 295 296 it.printf(xc + radius, yc + 1.7*radius, id(font_parameters), TextAlign::TOP_CENTER, 297 "%.0flx", id(illum).state); 298 299 300 // *** Temperature *** 301 min_range = -10; 302 max_range = 50; 303 xc = 188; 304 yc = 50; 305 306 measured = id(temp).state; 307 308 if (measured < min_range) { 309 measured = min_range; 310 } 311 if (measured > max_range) { 312 measured = max_range; 313 } 314 315 val = (measured - min_range) / abs(max_range - min_range) * alpha; 316 x0 = static_cast<int>(xc + radius + radius * cos(pi / 2 + beta / 2 + val)); 317 y0 = static_cast<int>(yc + radius + radius * sin(pi / 2 + beta / 2 + val)); 318 x1 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val + 0.1)); 319 y1 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val + 0.1)); 320 x2 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val - 0.1)); 321 y2 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val - 0.1)); 322 it.line(x0, y0, x1, y1); 323 it.line(x1, y1, x2, y2); 324 it.line(x2, y2, x0, y0); 325 326 it.printf(xc + radius, yc + 1.7*radius, id(font_parameters), TextAlign::TOP_CENTER, 327 "%.0f°C", id(temp).state); 328 329 330 // *** Humidity *** 331 min_range = 20; 332 max_range = 80; 333 xc = 242; 334 yc = 70; 335 336 measured = id(hum).state; 337 338 if (measured < min_range) { 339 measured = min_range; 340 } 341 if (measured > max_range) { 342 measured = max_range; 343 } 344 345 val = (measured - min_range) / abs(max_range - min_range) * alpha; 346 x0 = static_cast<int>(xc + radius + radius * cos(pi / 2 + beta / 2 + val)); 347 y0 = static_cast<int>(yc + radius + radius * sin(pi / 2 + beta / 2 + val)); 348 x1 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val + 0.1)); 349 y1 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val + 0.1)); 350 x2 = static_cast<int>(xc + radius + (radius+thick) * cos(pi / 2 + beta / 2 + val - 0.1)); 351 y2 = static_cast<int>(yc + radius + (radius+thick) * sin(pi / 2 + beta / 2 + val - 0.1)); 352 it.line(x0, y0, x1, y1); 353 it.line(x1, y1, x2, y2); 354 it.line(x2, y2, x0, y0); 355 356 it.printf(xc + radius, yc + 1.7*radius, id(font_parameters), TextAlign::TOP_CENTER, 357 "%.0f%%", id(hum).state); 358 359# # Uncomment it if you want the SmartPlant to enter into deep sleep 360# deep_sleep: 361# run_duration: 10s 362# sleep_duration: 3600s
Arduino
If you are still interested in programming directly with the Arduino IDE, the procedure is no different than with any other ESP32 devices:
Open the Arduino IDE and go to File -> Preferences option.
Add to the Additional Boards Manager URSLs the url:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
Close the preferences and open in the menu Tools -> Board -> Boards Manager.
Search for esp32 and install it. This might take some time.
Now you can select the board ESP32 Dev Module as the target board. Leave the rest of parameters by default.
Select the correct port and remember to enter the board into flashing mode before uploading the sketch.